スイッチをつなぐ
子機のスイッチが押された時に無線送信し、親機のDO1をトグル動作(High、Lowを交互に切り替える)させることができます。
ドア等の開閉の状態監視や、リモコンに使用できます。
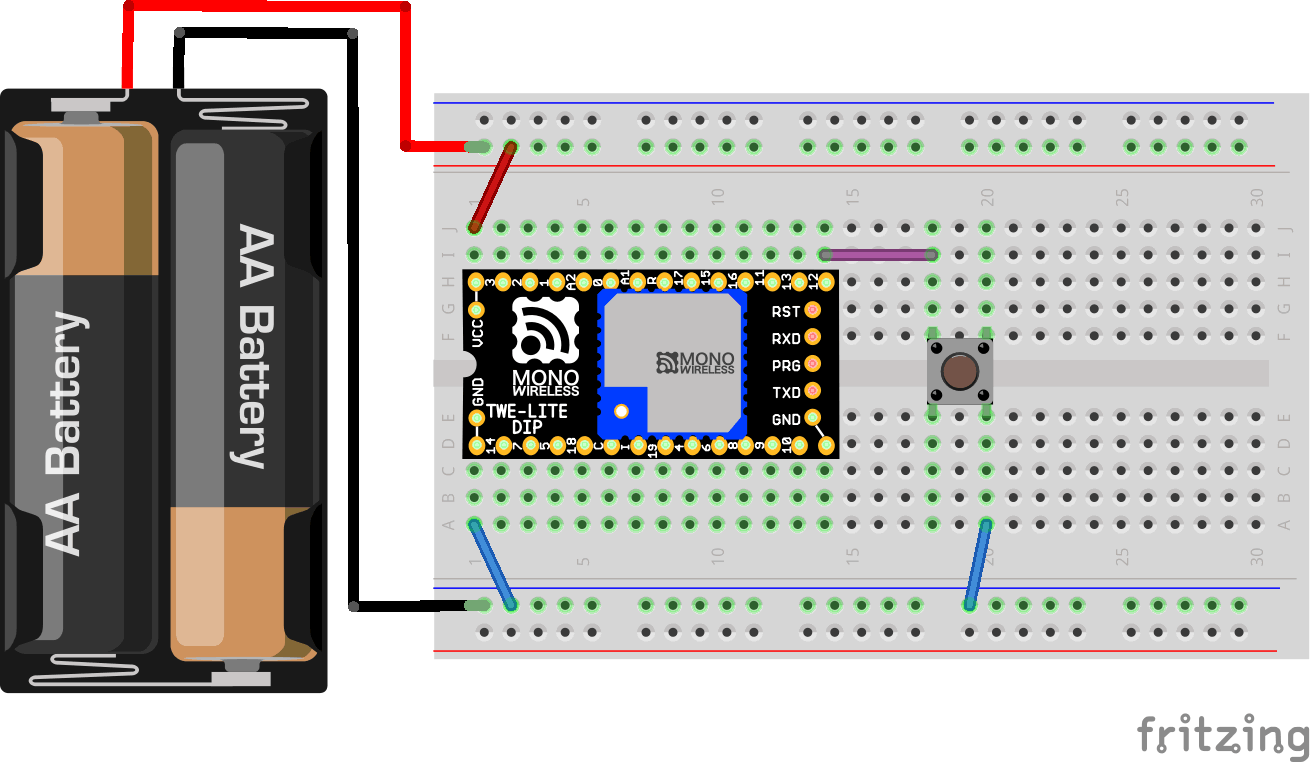
子機の回路図の例
以下の図のように配線し、電源をオンにして、押しボタン押したときに親機にパケットを送信することができます。押しボタンの代わりにリードスイッチを接続するとドア等の開閉を検出することができます。
センサー種別の設定
インタラクティブモードで、センサー種別(m)を0xFEに設定してください。
センサー固有パラメータの設定
- センサー固有パラメータを 0 に設定すると、DI1 (DIO12)の立ち下がりを検出するようになります。つまり、非導通状態が導通状態になったことを検出します。DI1 (DIO12)はTWELITE内部でプルアップされます。
例えば、押しボタンスイッチなどを接続し、スイッチが押されたことを検出するのに使用します。(例:ドアが閉じた時)
- センサー固有パラメータを 1 に設定すると、DI1(DIO12) の立ち上がりを検出するようになります。つまり、導通状態が非導通状態になったことを検出します。
例えば、磁気スイッチ(リードスイッチ)で普段は導通状態で磁石が離れることで非導通になることを検出するのに利用します。(例:ドアが開く)同時に、消費電流を抑制するためTWELITE内部のプルアップが停止されます。外部にプルアップ抵抗などの接続を行い、回路上、オープン状態にならないようにしてください。
DI1 -+- [1MΩ] --- VCC ← 外部プルアップが必要
+- [磁気(リード)スイッチ] --- GND
- センサー固有パラメータを 2 に設定すると、DI1(DIO12)で立ち下り、DI2(DIO13)で立ち上がりを検出するようになります。DI1 (DIO12)とDI2(DIO13)はTWELITE内部のプルアップが停止されますので外部にプルアップ抵抗を接続してください。
親機のDO1出力
子機からのパケットを受信する度に親機の DO1 をトグルさせます。
※ 複数の子機がある場合、いずれかの子機からのパケットを受信する度にHigh/Lowトグルします。
※ MONOSTICK では、DIO18(赤LED)がトグル点灯します。
親機でのUART出力
子機で得られたセンサ情報を親機の出力形式別に説明します。
標準出力形式
親機が初期設定の場合、子機からセンサ情報を受信したとき、ターミナルソフトは以下のように表示されます。
::rc=80000000:lq=150:ct=0016:ed=810043C1:id=0:ba=3060:bt=0000
このデータは以下のような情報が記述されています。
- rc: 中継機のSID(中継していない場合は0x80000000)
- lq: LQI
- ct: 続き番号
- ed: 子機SID
- id: 子機論理デバイスID
- ba: 子機の電源電圧(mV)
- bt: DI1の状態
セミコロン区切り形式
親機の設定をインタラクティブモードでオプションビットを0x00000020に変更することで以下のようにパソコンで処理しやすい表示形式に変更することができます。
;3175;00000000;165;000;10043c1;3120;1073;0735;0000;0001;P;0001;
;*1 ;*2 ;*3 ;*4 ;*5 ;*6 ;*7 ;*8 ;*9 ;*10 ;*11;*12;
このデータは以下のような情報が記述されています。
- *1: 親機起動後のタイムスタンプ[s]
- *2: 中継機のSID(中継していない場合は0x00000000)
- *3: LQI
- *4: 続き番号
- *5: 子機SID
- *6: 子機の電源電圧(mV)
- *7: AI1(mV)
- *8: AI3(mV)
- *9: センサのモード番号
- *10: DI1の状態
- *11: センサ種別
- *12: 親機DO1の状態
カンマ区切り形式
親機の設定をインタラクティブモードでオプションビットを0x00000040に変更することでTeratermなどでログを保存したときにExcelなどの表計算ソフトで読み込みやすい表示形式に変更することができます。
,3175, 00000000,165,000, 10043c1,3120,1073,0735,0000,0001,P,0001,
,*1 ,*2 ,*3 ,*4 ,*5 ,*6 ,*7 ,*8 ,*9 ,*10 ,*11,*12,
このデータは以下のような情報が記述されています。
- *1: 親機起動後のタイムスタンプ[s]
- *2: 中継機のSID(中継していない場合は0x00000000)
- *3: LQI
- *4: 続き番号
- *5: 子機SID
- *6: 子機の電源電圧(mV)
- *7: AI1(mV)
- *8: AI3(mV)
- *9: センサのモード番号
- *10: DI1の状態
- *11: センサ種別
- *12: 親機DO1の状態
書式形式(アスキー)形式
親機の設定をインタラクティブモードでオプションビットを0x00000100に変更することで以下のようにパソコンで処理しやすい表示形式に変更することができます。
:80000000A80000810043C100FECA043102DF00010173
^^^^^^^1^2^^^3^^^^^^^4^5^6^7^^^8^^^9^a^b^c^d
このデータは以下のような情報が記述されています。
- 1: 中継機のSID(中継していない場合は0x80000000)
- 2: LQI
- 3: 続き番号
- 4: 子機SID
- 5: 子機の論理デバイスID
- 6: センサ種別
- 7: 子機の電源電圧
- 8: AI1[mV]
- 9: AI3[mV]
- a: センサのモード番号
- b: DI1の状態
- c: 親機DO1の状態
- d: チェックサム
書式形式(バイナリ)形式
親機の設定をインタラクティブモードでオプションビットを0x00000300に変更することで以下のようにパソコンで処理しやすい表示形式に変更することができます。
A5 5A 80 15 80 00 00 00 A5 00 00 81 00 43 C1 00 FE CA 04 31 02 DF 00 01 01 FA 04
このデータは以下のような情報が記述されています。
- 2バイト: ヘッダ
- 2バイト: 0x8000 + 続くデータ長
- 4バイト: 中継機のSID(中継していない場合は0x80000000)
- 1バイト: LQI
- 2バイト: 続き番号
- 4バイト: 子機SID
- 1バイト: 子機の論理デバイスID
- 1バイト: センサ種別
- 1バイト: 子機の電源電圧
- 2バイト: AI1[mV]
- 2バイト: AI3[mV]
- 1バイト: センサのモード番号
- 1バイト: DI1の状態
- 1バイト: 親機DO1の状態
- 1バイト: チェックサム
- 1バイト: フッタ